

条件触发AMR避让流程/Conditionally triggered AMR avoidance process
AMR调度系统开发可以笼统的分为相应算法的适配和调优和特定场景的处理逻辑的开发,前者考量开发者的算法功底,具有一定的学术和前瞻性,后者主要考量开发者的开发功底,设计出合适、高效、稳定的逻辑
背景
在特定场景下,条件触发AMR进行避让时,需要清空来车的前向空间,所以需要AMR运动到预先设置的避让点进行避让,直到来车驶离,继续执行当前任务。
这种场景是由于来车不在本调度系统控制范围内,无法预知来车的运动规律和对其进行控制、亦或是其通行权限较高,比如:某些车间的人工操作的小火车等。
流程
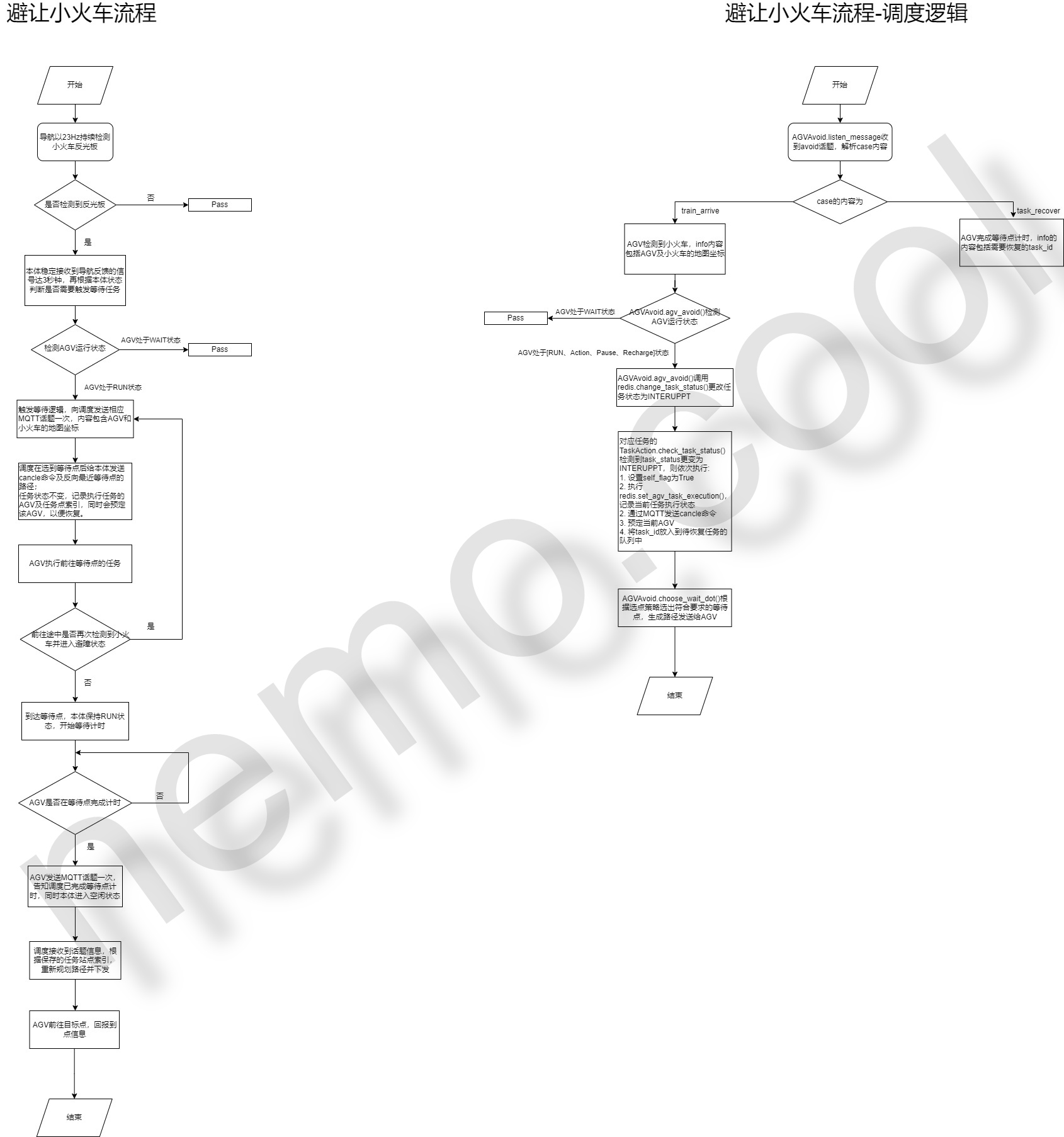
流程倒不难,主要是注意和AMR本体的配合,以及根据实际场景选择合适的触发和退出逻辑,保证可靠和效率
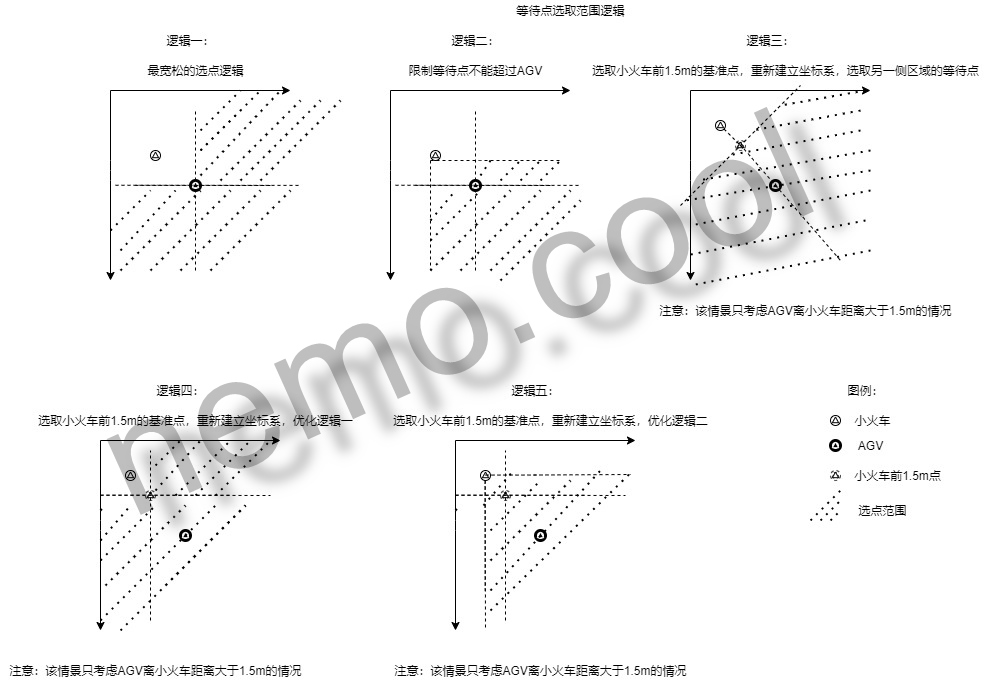
几种避让逻辑
逻辑三选点测试
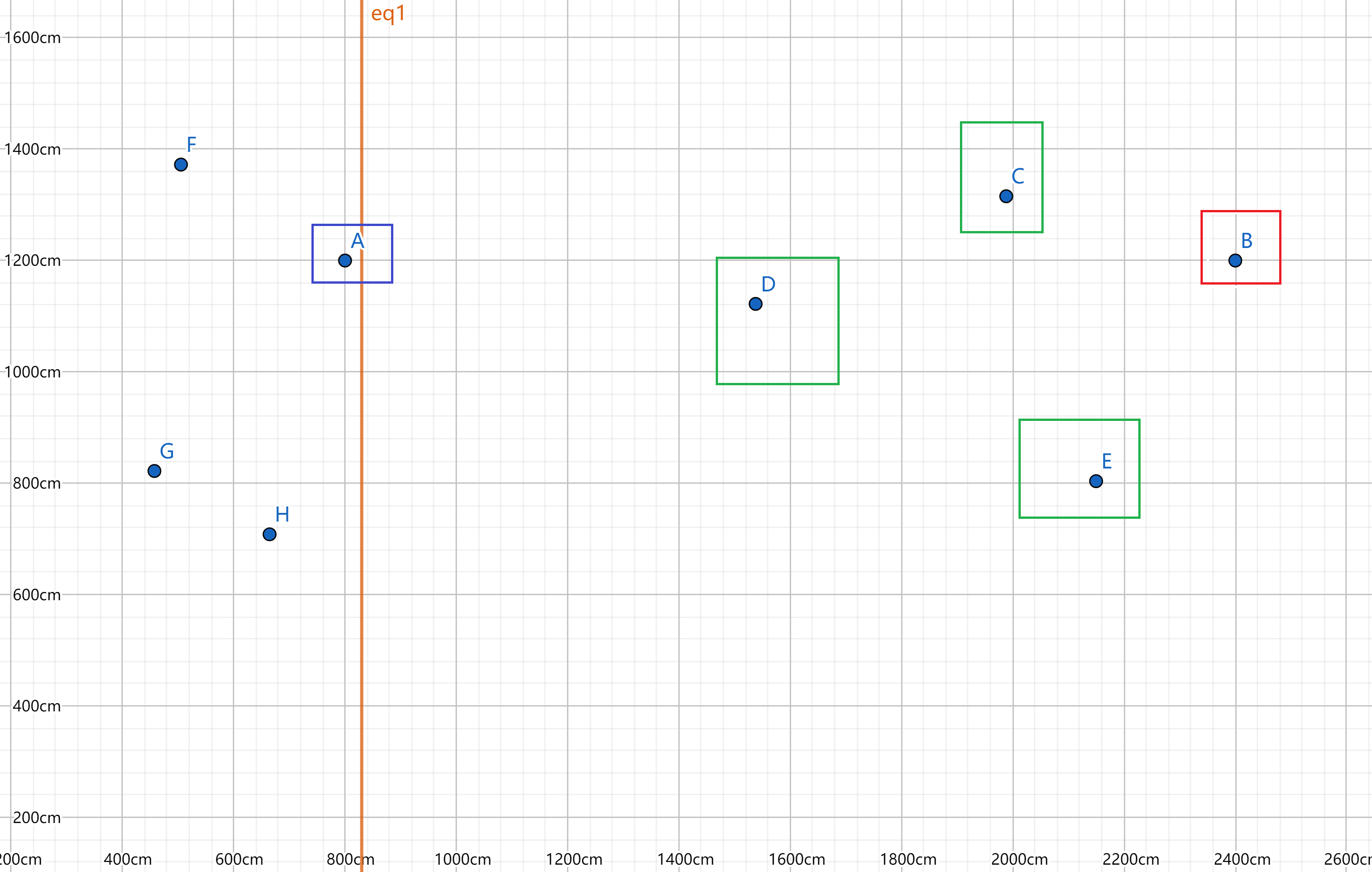
每组测试数据==点A为小火车,点B为AGV,其余点为等待点==,被选中的等待点集会根据离AGV与目标点的距离综合筛选出一个。
测试数据一
地址:https://www.geogebra.org/calculator/xhfrrduk
因坐标范围大,划分直线看似与小火车重叠
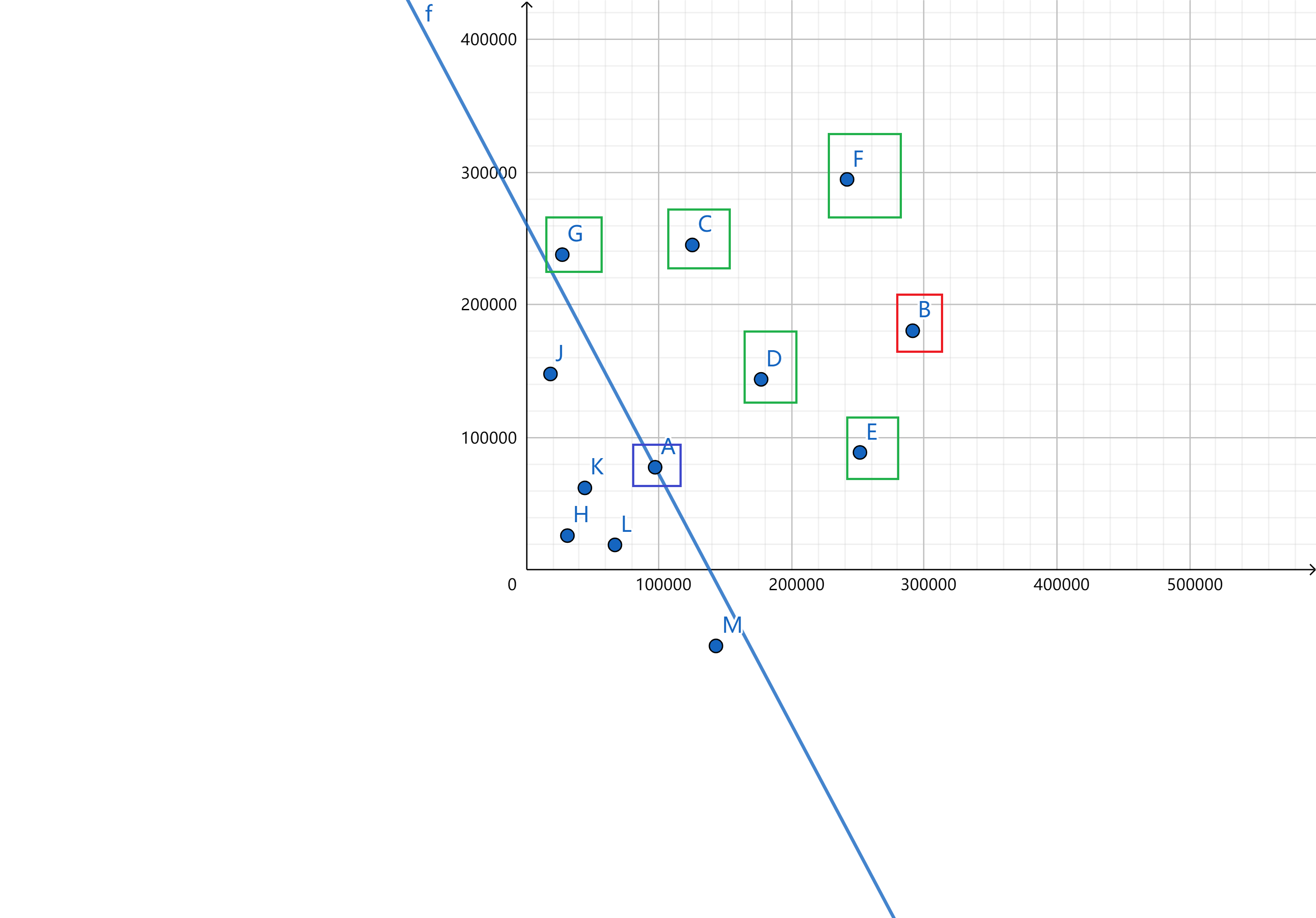
被选中的等待点为:==C、D、E、F、G==,通过
测试数据二
https://www.geogebra.org/calculator/xuwusbnq
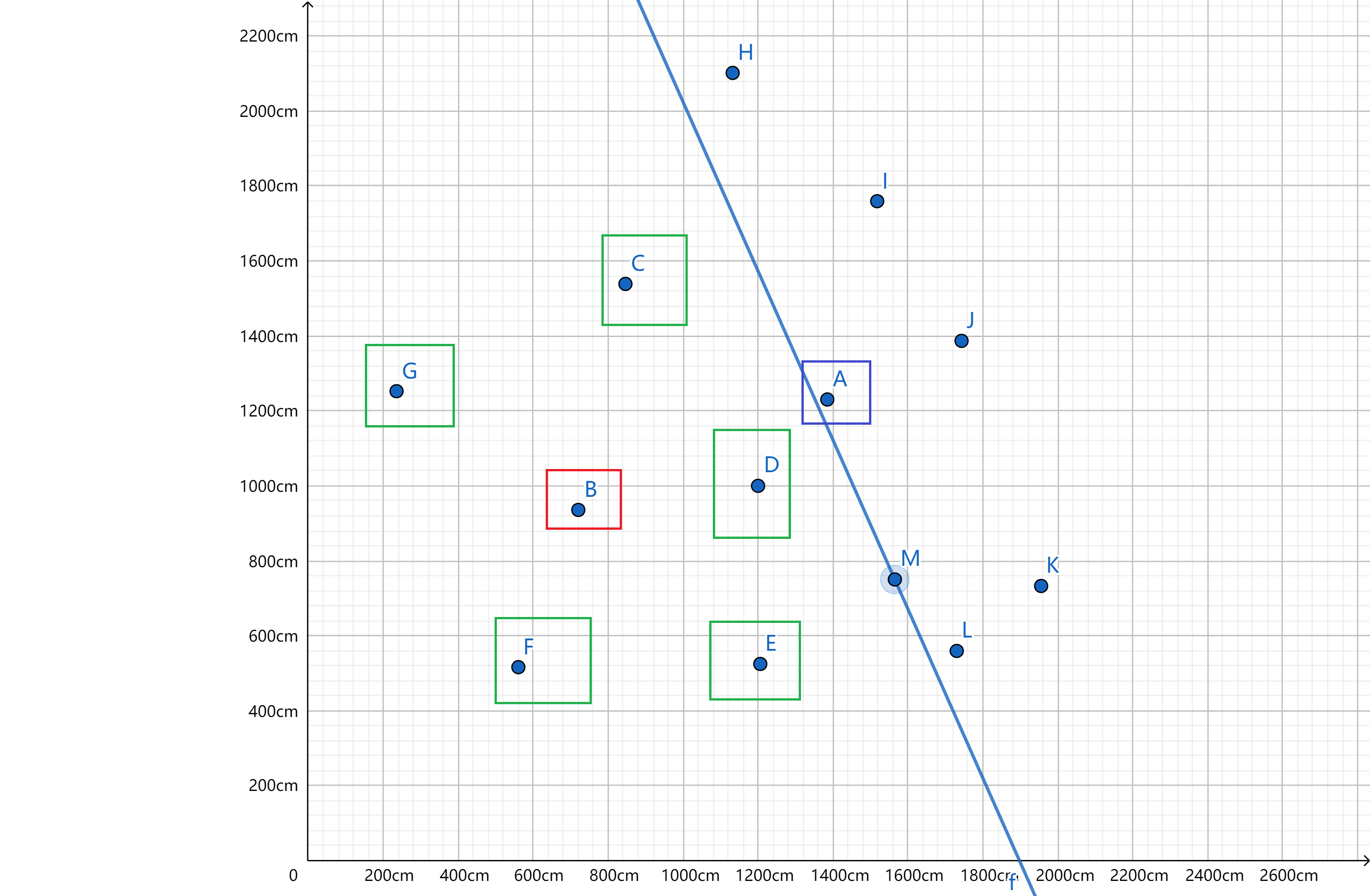
被选中的等待点为:==C、D、E、F、G==,通过
测试数据三
https://www.geogebra.org/calculator/ertqjzd2
特殊情况,小火车与AGV纵坐标相等
被选中的等待点为:==C、D、E==,通过
测试数据四
https://www.geogebra.org/calculator/eakcbesb
特殊情况,小火车与AGV横坐标相等
被选中的等待点为:==C、D、E==,通过
测试数据五
https://www.geogebra.org/calculator/pn4gwkbe
特殊情况,小火车与AGV的距离小于预设的1.5米距离
被选中的等待点为:==F、G、H==,通过
AMR scheduling system development can be broadly divided into the adaptation and tuning of the corresponding algorithm and the development of scenario-specific processing logic, the former considering the developer’s algorithmic skills, with a certain degree of academic and forward-looking, and the latter mainly considering the developer’s development skills, to design a suitable, efficient and stable logic
Background
In a specific scenario, when the condition triggers AMR to avoid, it needs to clear the forward space of the oncoming car, so it needs AMR to move to the pre-set avoidance point to avoid until the oncoming car drives away and continues to perform the current task.
This scenario is due to the fact that the incoming traffic is not under the control of this dispatching system, so it is impossible to predict the movement pattern of the incoming traffic and control it, or its passage authority is high, such as: the manually operated trains in some workshops, etc.
Flow
The flow is not too difficult, but the main thing is to pay attention to the cooperation with the AMR body, and to choose the appropriate trigger and exit logic according to the actual scenario to ensure reliability and efficiency
Several kinds of avoidance logic
Logic three point selection test
Each set of test data == point A is a small train, point B is an AGV, and the rest of the points are waiting points == the selected waiting points will be selected one based on the combined distance from the AGV and the target point.
test data one
Address: https://www.geogebra.org/calculator/xhfrrduk
Due to the large range of coordinates, dividing the straight line appears to overlap with the small train
Selected waiting points are:==C, D, E, F, G==, pass
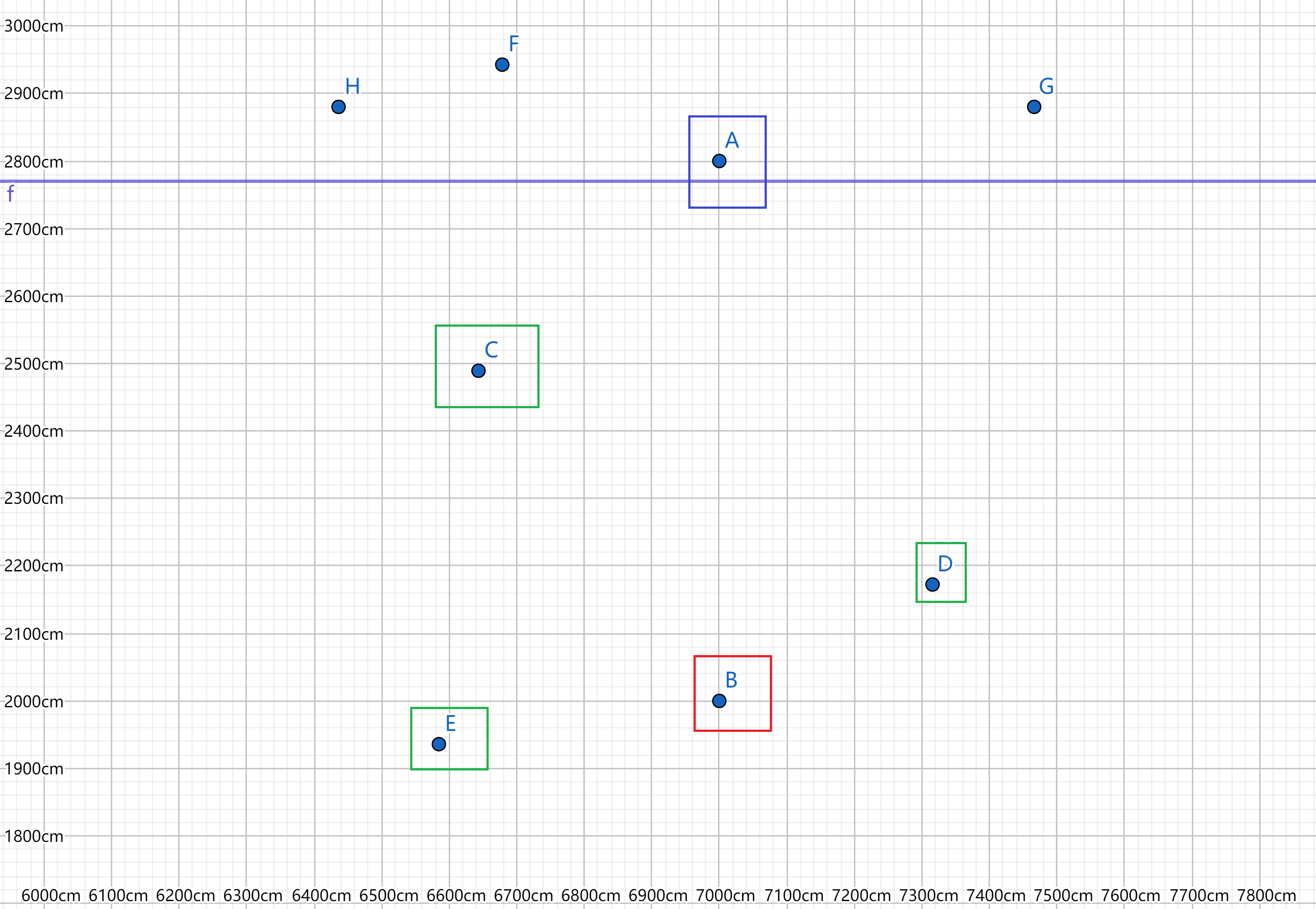
test data two
https://www.geogebra.org/calculator/xuwusbnq
Selected wait points are:==C, D, E, F, G==, pass
test data three
https://www.geogebra.org/calculator/ertqjzd2
Special case, small train and AGV vertical coordinates are equal
The selected waiting points are: ==C, D, E==, pass
test data four
https://www.geogebra.org/calculator/eakcbesb
Special case, small train and AGV horizontal coordinates are equal
The selected waiting points are: ==C, D, E==, pass
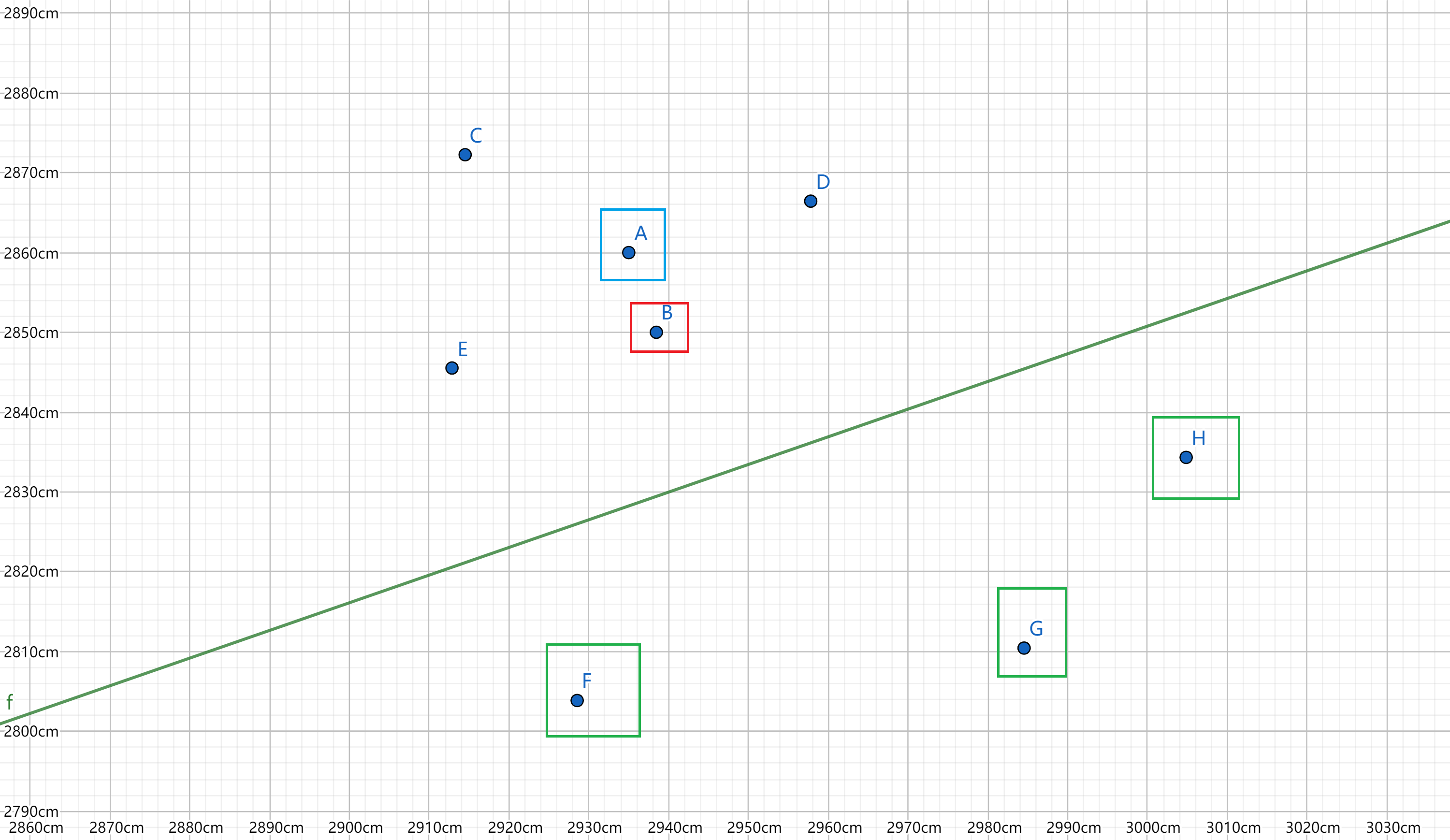
test data five
https://www.geogebra.org/calculator/pn4gwkbe
Special case, the distance between the train and the AGV is less than the preset distance of 1.5 meters
Selected waiting points are:==F, G, H==, pass

发表回复